| Name | Mohammad Javadi |
| Date of birth | July 20, 1994 |
| Originally from | Tehra, Iran |
| Languages | Persian, English, Turkish |
| mohammadjv94@gmail.com |
Topics of Interest
- Computer Vision
- Deep Learning
- Digital Image Processing
- Computer Vision Neuro Science
- Bioinformatics
- Intelligent Robotics
B.Sc student in Computer Engineering and Information Technology at Amirkabir University of Technology (Tehran Polytechnic). Diploma in Mathematics and Physics, Allame Helli(2) High School, Tehran, Iran, 2013.
|
Cognitive Robotics Lab - May 2018 - June 2018
|
Burgard Exploration in ROS-based Virtual Robots Amirkabir University of Technology, Tehran, Iran
In this work we implemented the Burgard Exploration as a ROS node.
This node subscribes to the published information from the Gazebo environment, scanning laser rangefinder, and the other robots, and then, selects a point
on a shared map to explore. The communication between robots is done through the ROSCORE. |
|
Cognitive Robotics Lab - September 2017 - March 2018
|
Zoom-RNN: A Novel Method for Person Recognition Using Recurrent Neural Networks Amirkabir University of Technology, Tehran, Iran
In this research, we introduced a novel method to improve Person Recognition task's accuracy
on Person In Photo Albums(PIPA) dataset by integration of
Recurrent Neural Networks and feature fusion from the different body parts. |
|
Cognitive Robotics Lab - October 2017 - April 2018
|
Vehicle Registration Plate Recognition using CNNs, my BSc Thesis Amirkabir University of Technology, Tehran, Iran In this project, that was my bachelor thesis, a two-stage system is implemented
for detection and recognition of the Persian plates in urban traffic cameras.  |
|
Bio-Inspired System Design Laboratory - Spring 2017
|
Humanoid Robot Detection Using Deep Learning: A Speed-Accuracy Trade-off Amirkabir University of Technology, Tehran, Iran We compare several two-stage detection systems based on various CNN's and highlight their speed-accuracy trade off. The approach performs edge based image segmentation in order to reduce the search space and then a CNN validates the detection in the second stage. Paper were published in RoboCup Symposium 2017. (paper Link) Codes are available on Github. 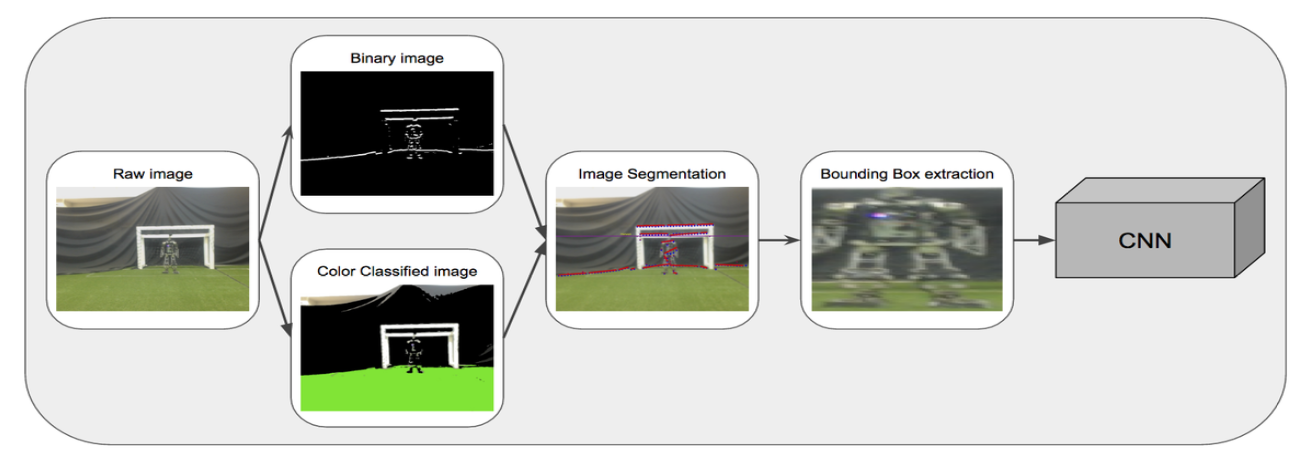 |
|
Bio-Inspired System Design Laboratory - Started February 2016, Ended May 2017
|
Humanoid Robot Localization using Particle Filter Amirkabir University of Technology, Tehran, Iran As humans model their environment, humanoids also must do it to be aware of world model and make appropriate decisions in a timely manner. For this purpose, based on statistical analysis(Particle Filter and Monte Carlo methods) and using provided perception data(goals, lines, landmarks, and center circle in a soccer field) by humanoid vision module, we can use relative distances to our self in order to find our location in a soccer field. Source code is not released because of the team rules. 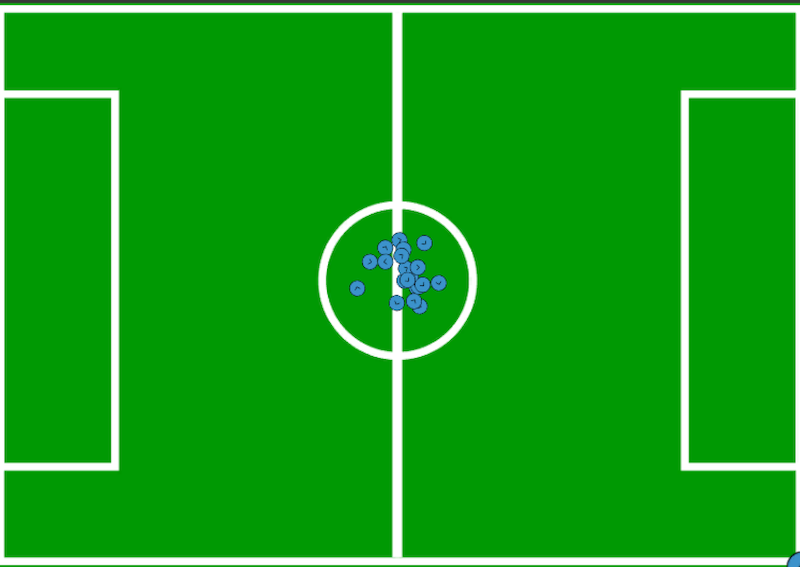 |
|
Hirad Design and Construction Co - started February 2016 , ended February 2017
|
Mobile Application Development for Home Automation Advanced Technology Centre of Amirkabir University of Technology, Tehran, Iran
A smart home involves the control and automation of lighting, heating, ventilation, air conditioning, security and etc.
In this project, I implemented a cross-platform application(can be used in Android, iOS, BlackBerry and Desktop platform)
using Qt library which enables users to control a smart house through wifi. |
|
Mobin Intelligent System - started October 2015 , ended February 2016
|
A Base Code for License Plate Detection Mobin Intelligent System , Tehran, Iran
Detection and recognition of vehicle registration plate in urban traffic cameras were the goals of our system.
The constraint of this project was the system processor that was a DSP board and forced us not to use
high-level c++ libraries(like OpenCV, Qt and etc). |
|
Amirkabir Robotic Center - started September 2014 , ended June 2017
|
A High Speed Vision System for Humanoid Soccer Player Robots Amirkabir University of Technology, Tehran, Iran
In this research, we implemented a high-speed cognition module for AUTMan Humanoid Robotic Team.
The outputs(ball, goal posts, lines, center-circle, and obstacles) of the system are considered as inputs to localization and behavior modules.
Challenges of the project are: 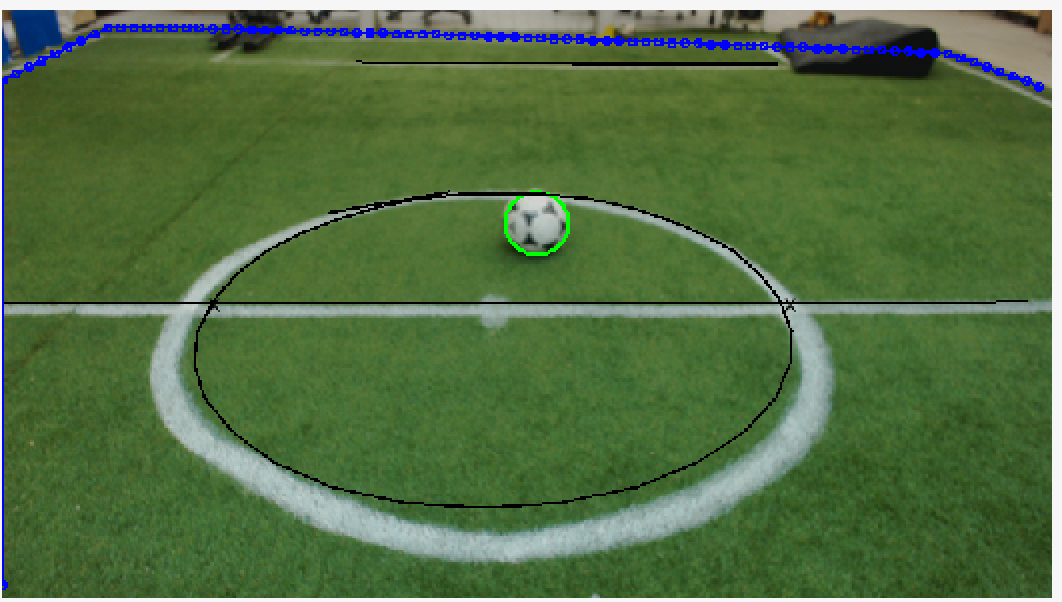 |
|
Publications Technical Reports |
Mohammad Javadi
Tehran, Iran
E-mail:
mohammadjv94@gmail.com
mohammad.javadi@aut.ac.ir
Mobile: +98 936 481 9275